Hamlyn Centre Laparoscopic / Endoscopic Video Datasets
Welcome to the Hamlyn Centre Laparoscopic / Endoscopic Video Dataset Page. Image processing and computer vision research can be carried out using cheap webcams. However, working with medical data requires access to hospitals, patient consent and validation (requiring expensive hardware). This webpage has been created to provide easy access to in vivo patient datasets and validation datasets. Permission is given to use and publish all data on this website. If you use these datasets we request that you cite the appropriate paper(s).
We are in the process of adding more data and this webpage will be periodically updated with new datasets.
| Implementation of the Affine-invariant anisotropic feature detector | |
|---|---|
| The implementation of the Affine-invariant anisotropic feature detector can be downloaded here. | |
| If you use this code please reference paper [6]. If you have any questions about the executable please contact stamatia.giannarou03 "at" imperial.ac.uk |
| Preview | Video | Size | Description | Ref |
|---|---|---|---|---|
 |
2.5Gb |
NEW! A video dataset that contains ten in vivo sequences and ground truth data for region tracking and retargeting in GI endoscopy. These videos were collected in standard GI examinations, and they involve challenges in endoscopy, such as tissue deformation and rapid endoscope movement. | [7] | |
 |
9.3Gb |
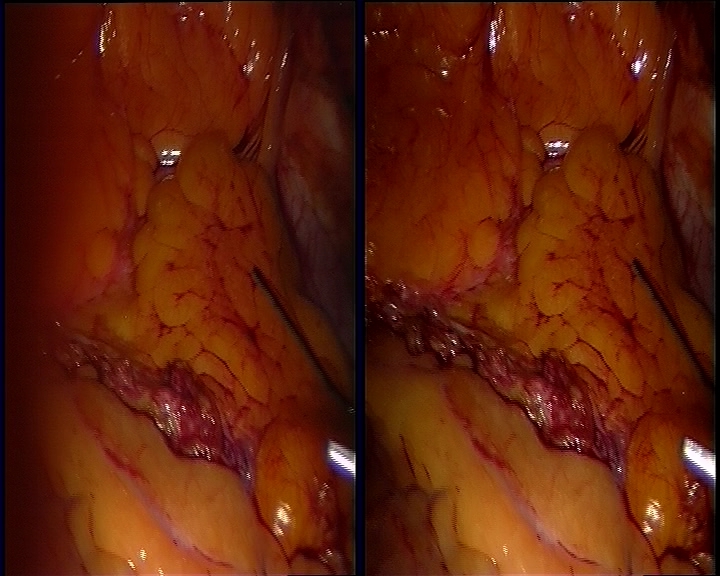
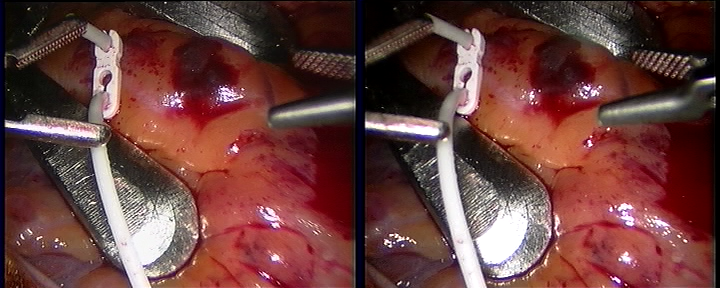
NEW! This dataset contains ~40,000 pairs of rectified stereo images collected in partial nephrectomy in da Vinci surgery. Its primary use has been for training and testing deep learning networks for disparity (inverse depth) estimation. Please see [8] for details. | [8] |
| Preview | Video | Size | Description | Ref |
|---|---|---|---|---|
  |
1.4Gb 1.4Gb |
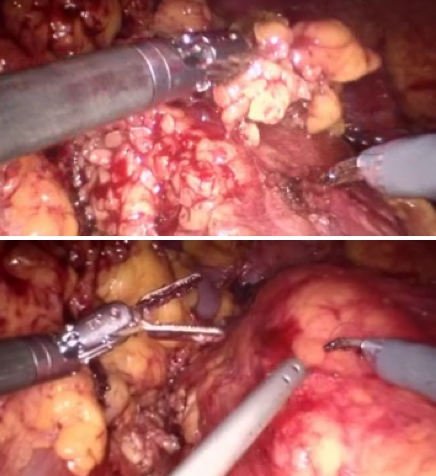
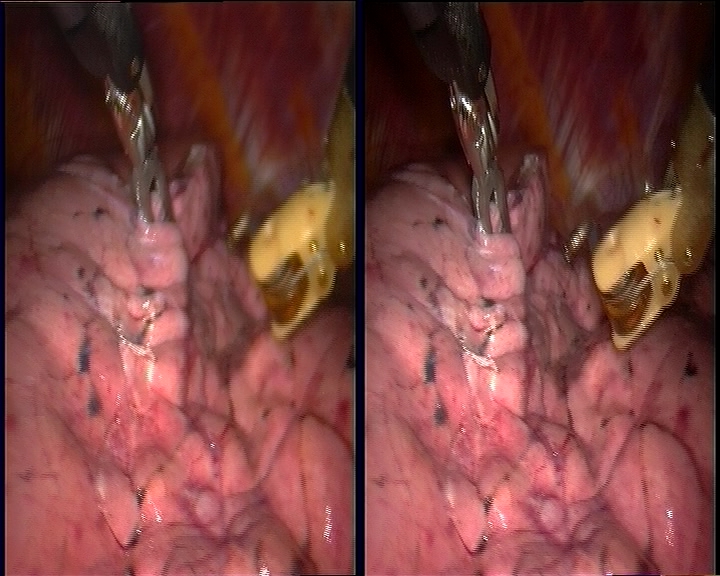
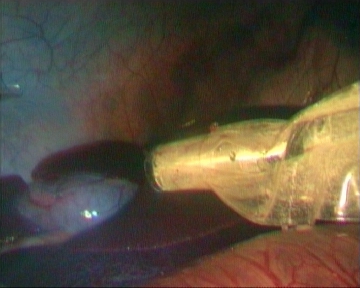
In vivo porcine procedure of diaphragm dissection. The data involves blur due to cauterisation induced smoke, significant deformation due to cardiac motion, artefacts due to bleeding, specular reflections and instrument occlusion. | [6] | |
 |
141.1Mb |
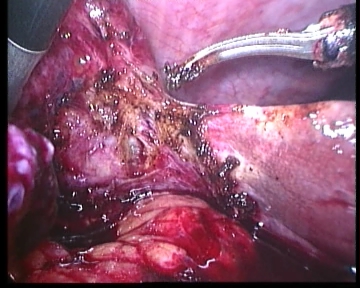
In vivo TECAB procedure. The data involves soft tissue deformation and illumination changes. | [6] | |
 |
1.0Gb |
In vivo lung lobectomy procedure. The data involves significant deformation due to respiration and instrument tissue interaction. | [6] | |
 |
1.3Gb |
Low quality in vivo data captured using a Medigus Camera mounted on an articulated laparoscopic robot during an intra-abdominal exploration. The sequence involves tissue deformation due to respiration. | [6] | |
 |
244.3M |
Low quality in vivo data captured using a Medigus Camera mounted on an articulated laparoscopic robot during an intra-abdominal exploration. The sequence involves scale changes due to tissue motion. | [6] | |
 |
42.7M |
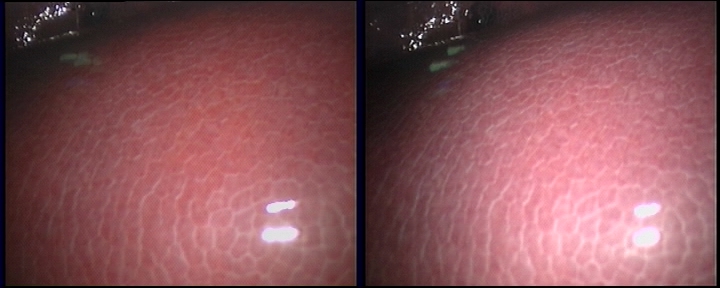
In vivo procedure. The data involves significant changes in the surgical environment introduced due to the presence of saline water used to clean the tissue surface. | [6] | |
 |
79.2M |
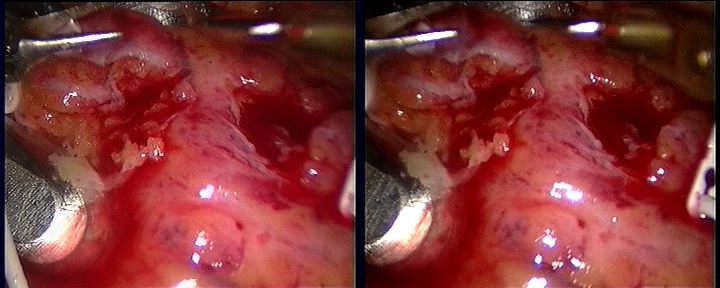
In vivo procedure. The sequence involves blur due to smoke combined with occlusion and tissue deformation due to tissue-tool interaction. | [6] | |
 |
75.4M |
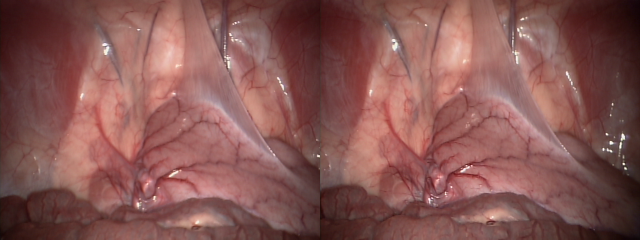
In vivo porcine data collected during intra-abdominal exploration with a moving articulated laparoscope present in the field of view. The data involves changing illumination conditions. | [6] |
| Preview | Video | Calibration | Resolution | Ground Truth | Size & Time | Description | Ref |
|---|---|---|---|---|---|---|---|
 |
Left Right Stereo |
320x240 | N/A |
0.46GB 0.35s |
Porcine Procedure. Laparoscope is moved around viewing the abdomen wall. Deformation is minimal. | [1] | |
 |
video | Left Right Stereo |
360x288 | N/A |
0.23GB 15s |
Porcine Procedure. Laparoscope is static and viewing a deforming liver. The liver deforms due to respiration. | [1] |
 |
video | Mono | 720x576 | N/A |
3.4GB 120s |
Ex Vivo Porcine Procedure. No Deformation. The Laparoscope is navigated around the abdomen viewing the liver, spleen and bowel. | [1] |
| video | Left Right Stereo |
360x288 | N/A |
1.0GB 62s |
In vivo Procedure. Cardiac surface deforming with respriation and cardiac motion. | [2] |
| video | Left Right Stereo |
360x288 | N/A |
0.5GB 35s |
In vivo Procedure. Cardiac surface deforming with respriation and cardiac motion. | [2] |

| left right | Left Right Stereo |
640x480 | N/A |
0.2GB each 41s |
In vivo Porcine Procedure. The laparoscope is navigated along the optical axis causing scale change in the image. | [1] |
| left right | Left Right Stereo |
640x480 | N/A |
0.15GB each 23s |
In vivo Porcine Procedure. The laparoscope is rotated around the optical axis causing a change in orientation in the image. | [1] |
| left right | Left Right Stereo |
640x480 | N/A |
2.5GB each 8min |
In vivo Porcine Procedure. Navigation to the Uterine Horn, transection of the horn and re-anastomosis. | [1] |
| left right | Left Right Stereo |
640x480 | N/A |
0.15GB each 26s |
In vivo Porcine Procedure. Static laparoscope, liver deforming due to respiration. | [1] |
 |
Video | N/A | 720x576 | N/A |
1.19GB 5.5min |
Ex vivo NOTES procedure. The endoscope navigates through the abdomen. | [3] |
| left right | Left Right Stereo |
360x288 |
0.75GB each 1.5min |
Validation dataset: Silicon heart phantom deforming with cardiac motion and associated CT scans. | [4][5] | |
| left right | Left Right Stereo |
360x288 |
1GB each 1.25min |
Validation dataset: Silicon heart phantom deforming with cardiac motion and associated CT scans. | [4][5] | |
| Video | Left Right Stereo |
360x288 | N/A |
50MB 4s |
In vivo camera pan showing the abdomen wall. | [1] |

| Video | Left Right Stereo |
720x288 | N/A |
0.36GB 3.5min |
In vivo porcine. Camera motion and liver motion caused by respiration. | [1] |

| Video | Left Right Stereo |
720x288 | N/A |
0.3GB 2.45min |
In vivo porcine. Camera motion and liver motion caused by respiration. | [1] |

| Video | Left Right Stereo |
720x288 | N/A |
0.26GB 2.45min |
In vivo porcine. Camera motion and liver motion caused by respiration. | [1] |

| Video | Left Right Stereo |
720x288 | N/A |
0.19GB 2.26min |
In vivo porcine. General camera motion in abdomen. | [1] |
| Video | Left Right Stereo |
720x288 | N/A |
0.31GB 3.45min |
In vivo porcine. General camera motion in abdomen with tissue-tool interaction. | [1] |
| Video | Left Right Stereo |
720x288 | N/A |
0.58GB 7.02min |
In vivo porcine. General camera motion in abdomen with tissue-tool interaction. | [1] |

| Video | Left Right Stereo |
720x288 | N/A |
0.18GB 1.44min |
In vivo porcine. General camera motion in abdomen with some tissue deformation. | [1] |

| Video | Left Right Stereo |
720x288 | N/A |
0.37GB 3.34min |
In vivo porcine. General camera motion in abdomen with liver motion due to respiration. | [1] |

| Video | Left Right Stereo |
720x288 | N/A |
0.11GB 1.20min |
In vivo porcine. Camera panning around abdomen. | [1] |

| Video | Left Right Stereo |
720x288 | N/A |
0.7GB 7.30min |
In vivo porcine. General camera motion in abdomen with tissue deformation due to tool interaction. | [1] |

| Video | Left Right Stereo |
720x288 | N/A |
0.23GB 2.26min |
In vivo porcine. Tissue-tool interaction and diathermy. | [1] |

| Video | Left Right Stereo |
720x288 | N/A |
0.11GB 1.24min |
Ex vivo porcine. General camera motion in a static abdomen. | [1] |

| Video | Left Right Stereo |
720x288 | N/A |
0.21GB 2.10min |
Ex vivo porcine. General camera motion in a static abdomen. | [1] |

| Video | Left Right Stereo |
720x288 | N/A |
0.21GB 2.10min |
Ex vivo porcine. Visualisation of the ureter and kidney. | [1] |
| References | |
|---|---|
| [1] | Peter Mountney, Danail Stoyanov and Guang-Zhong Yang: Three-Dimensional Tissue Deformation Recovery and Tracking: Introducing techniques based on laparoscopic or endoscopic images. IEEE Signal Processing Magazine. 2010 July. Volume: 27. Issue: 4. pp. 14-24. |
| [2] | Danail Stoyanov, George Mylonas, Fani Deligianni, Ara Darzi, Guang-Zhong Yang: Soft-tissue Motion Tracking and Structure Estimation for Robotic Assisted MIS Procedures. Medical Image Computing and Computer Assisted Interventions (MICCAI05), vol. 2, pp. 139-146, 2005 |
| [3] | Mirna Lerotic, Adrian J. Chung, James Clark, Salman Valibeik and Guang-Zhong Yang: Dynamic View Expansion for Enhanced Navigation in Natural Orifice Transluminal Endoscopic Surgery Medical Image Computing and Computer Assisted Interventions. Medical Image Computing and Computer Assisted Interventions (MICCAI08), pp.467-475, 2008 |
| [4] | Danail Stoyanov, Marco Visentini-Scarzanella, Philip Pratt and Guang-Zhong Yang: Real-Time Stereo Reconstruction in Robotic Assisted Minimally Invasive Surgery. Medical Image Computing and Computer Assisted Interventions (MICCAI10), to appear in 2010. |
| [5] | Philp Pratt, Danail Stoyanov, Marco Visentini-Scarzanella and Guang-Zhong Yang: Dynamic Guidance for Robotic Surgery using Image-Constrained Biomechanical Models. Medical Image Computing and Computer Assisted Interventions (MICCAI10), to appear in 2010. |
| [6] | Stamatia Giannarou, Marco Visentini-Scarzanella, Guang-Zhong Yang, "Probabilistic Tracking of Affine-Invariant Anisotropic Regions," IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 99, 2012 |
| [7] | M. Ye, S. Giannarou, A. Meining, G.-Z. Yang. "Online Tracking and Retargeting with Applications to Optical Biopsy in Gastrointestinal Endoscopic Examinations". Medical Image Analysis. 2015. |
| [8] | M. Ye, E. Johns, A. Handa, L. Zhang, P. Pratt and G.-Z. Yang. "Self-Supervised Siamese Learning on Stereo Image Pairs for Depth Estimation in Robotic Surgery". Hamlyn Symposium on Medical Robotics. 2017. |
The following people have been invloved in the collection of this data: Stamatia Giannarou, Danail Stoyanov, David Noonan, George Mylonas, Jim Clark, Marco Visentini-Scarzanella, Pete Mountney and Guang-Zhong Yang
If you have any questions about the datasets please contact stamatia.giannarou03 "at" imperial.ac.uk